GRASP
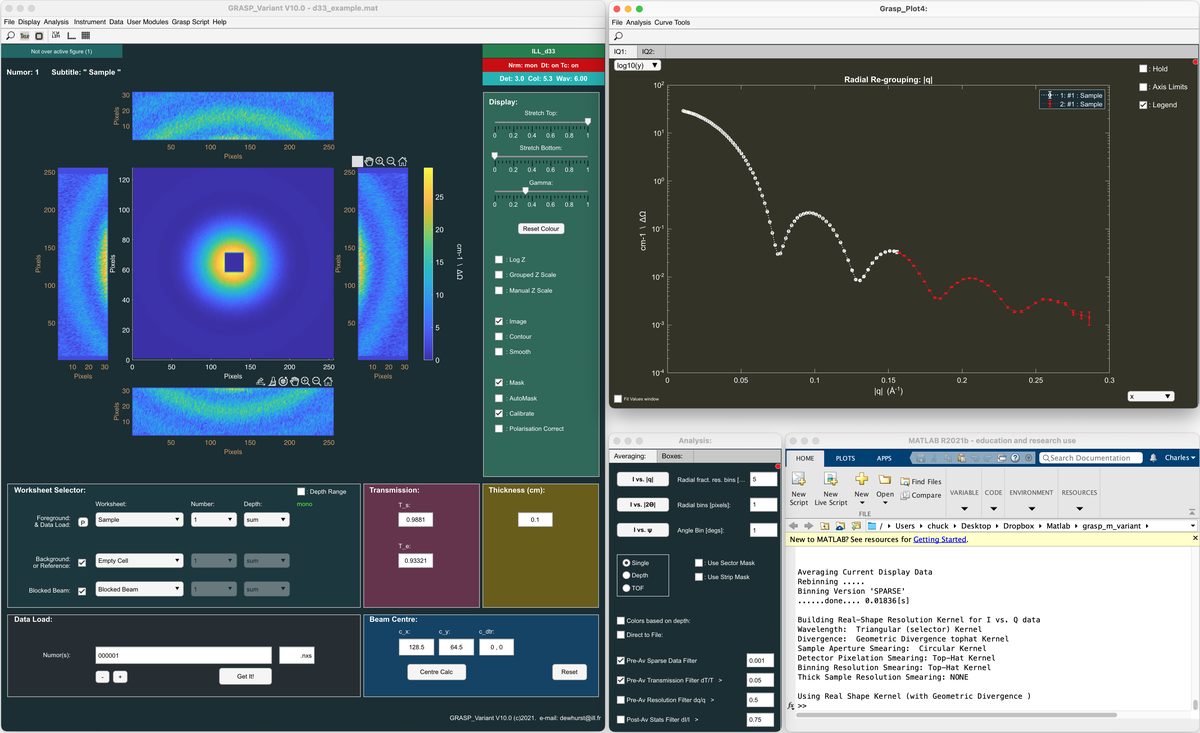
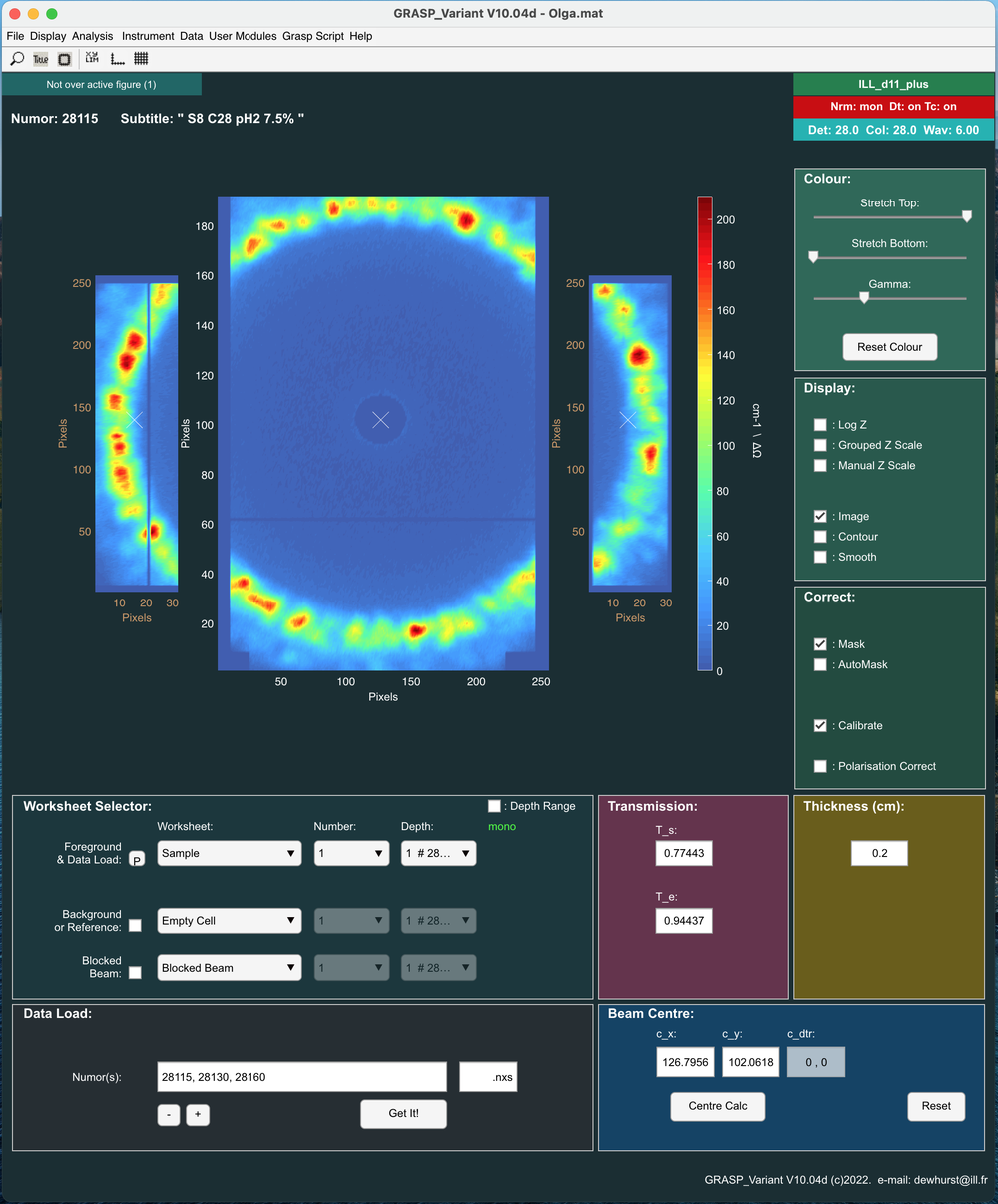
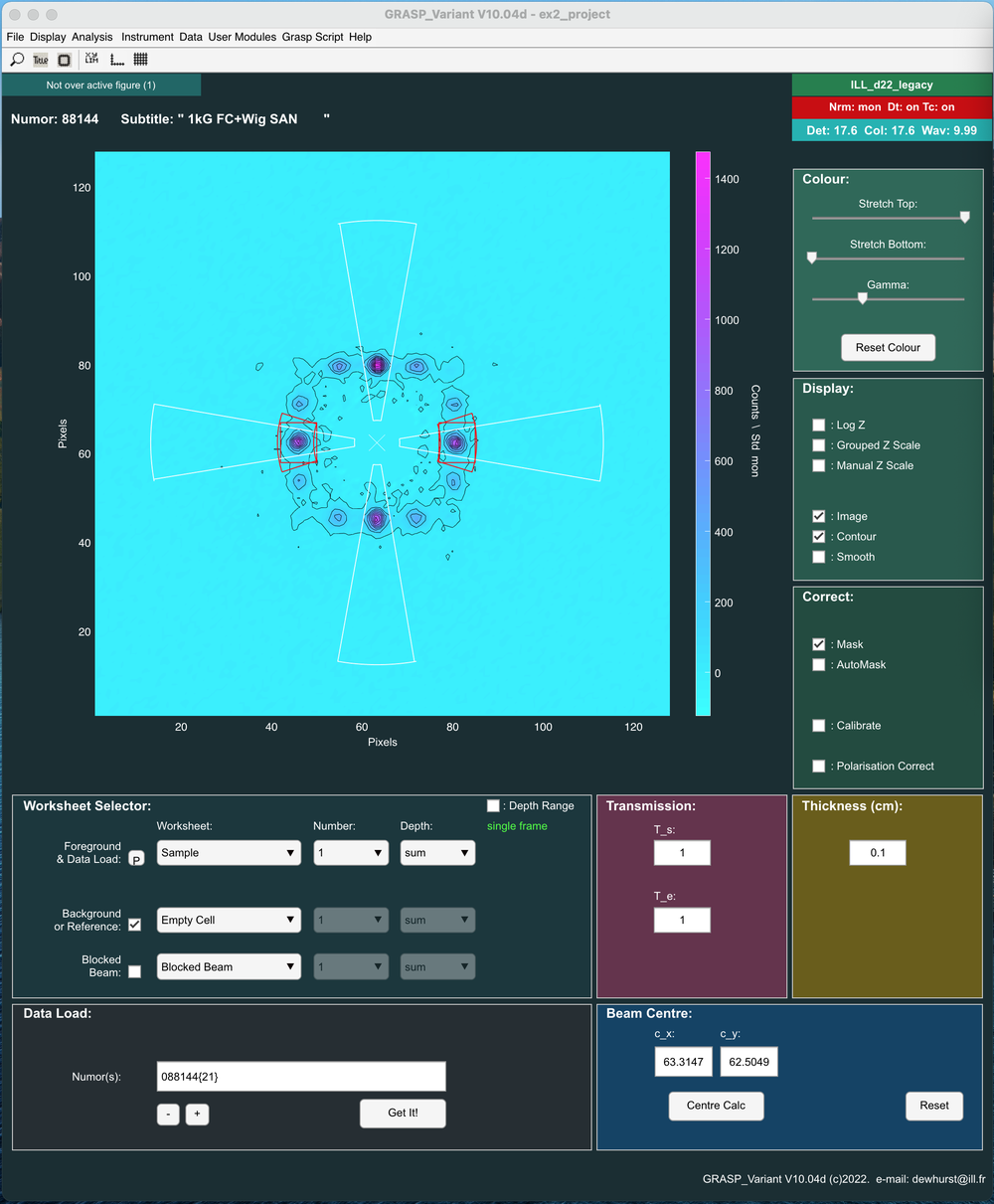
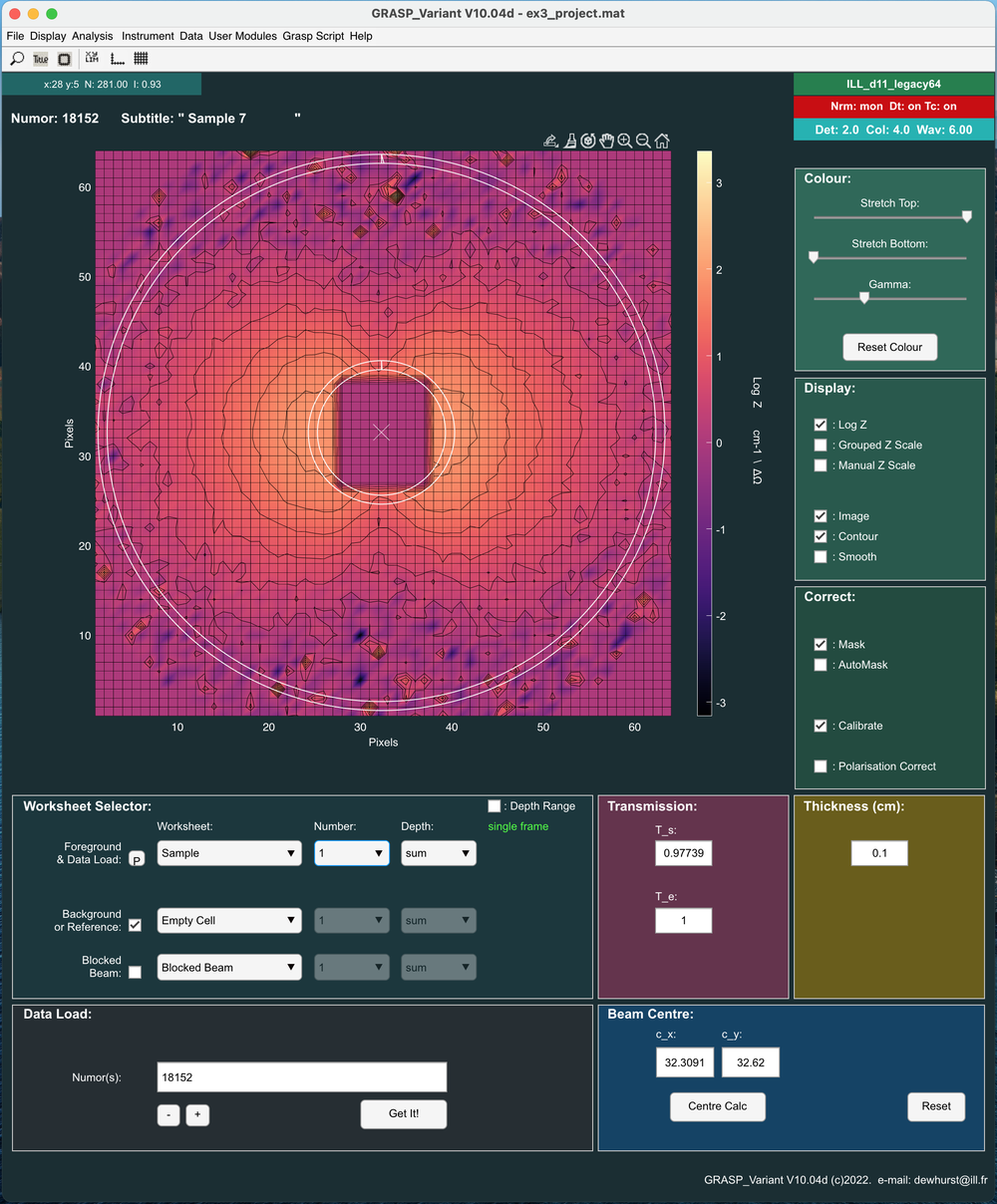
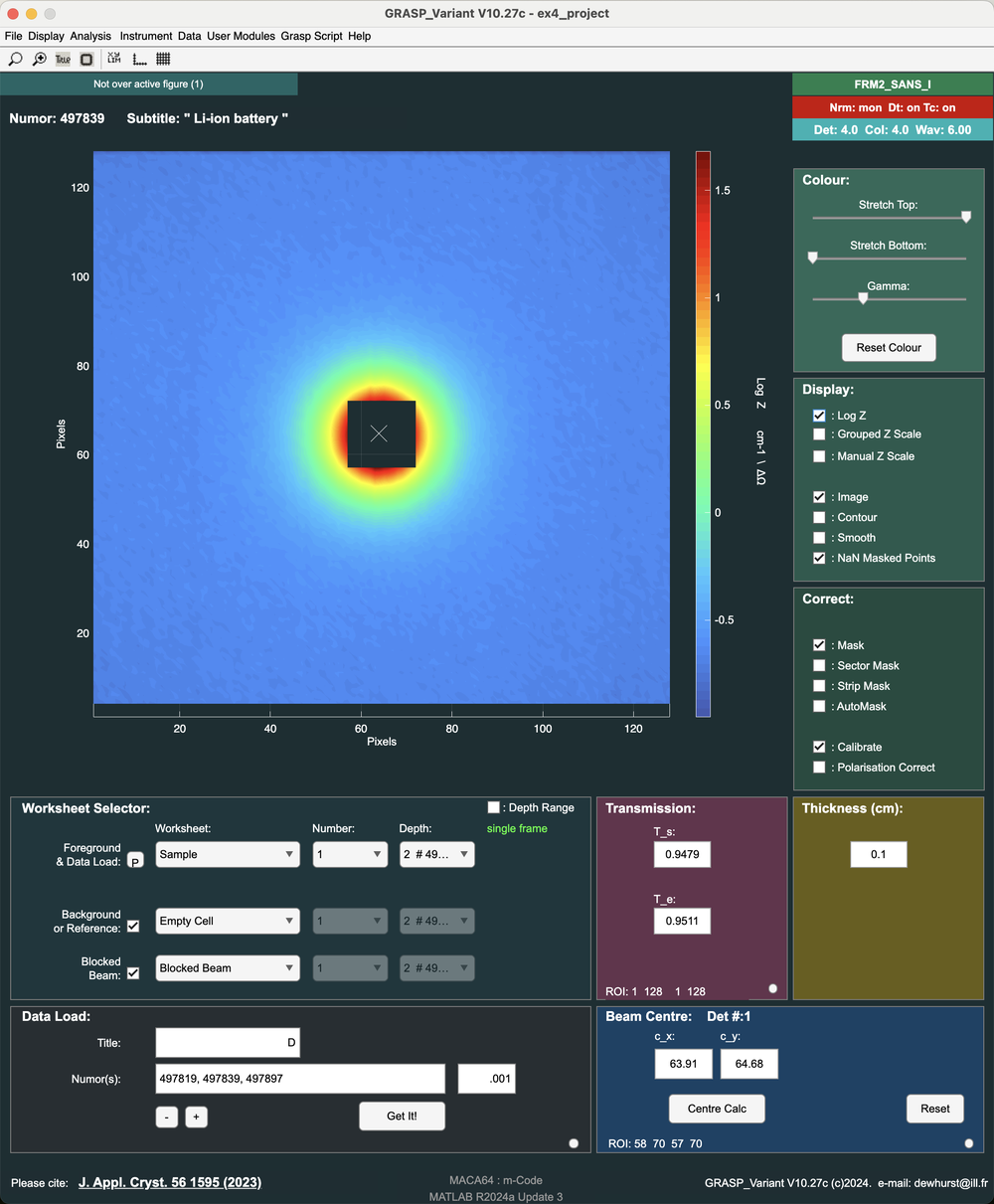
"GRASP" is a MATLAB™ script application designed for the graphical inspection, analysis and reduction of multi-detector data produced by the Small-Angle Neutron Scattering (SANS) instruments of the Institut Laue-Langevin (ILL).
GRASP deals with many of the diverse requirements for analysis and reduction of SANS data using a general set of tools and reduction algorithms. Data loaders and instrument configurations for the ILL SANS instruments, D11, D22, D33 and SAM as well as SANS instruments at other neutron sources, are included in the GRASP package. The architecture and coding of GRASP is continously developed with the aim to provide a general access to multi-detector and complex data set handling using the matrix handling abilities, graphics and other advantages of the MATLAB™ environment.
The drive for producing such a suite of software came from the overwhelming need for a modern, complete and general-purpose package to deal with typical procedures required to reduce and analyse two-dimensional SANS multidetector data. By it’s very nature, two-dimensional data is often best appreciated in a graphical form. The birth of GRASP came from the need for graphical inspection and quick processing and extraction of the scattered intensity, I(q), as a function of position on the multidetector (qx,qy) or as a function of sample environment conditions from a series of many measurement runs (e.g. temperature sweep, rocking curve etc.).
- Modern, GUI oriented software suite
- Powerful graphical data display
- Emphasis on 2D multidetector data (anisotropic analysis)
- Easy background and calibration corrections to data
- Easy analysis and re-grouping of run number sequences for measurements with varying sample environment conditions. e.g. rocking curves, temperature scans, TOF and kinetic measurements
- 1D and 2D Graphical Export (eps, jpg, bmp, etc.)
- 1D and 2D Data Export (ASCII, NeXus)
GRASP is developing daily, responding to the needs, requests and bug-fixes noted by the growing number of SANS experimentalists who are using this SANS data reduction software.
Comments and suggestions for improvement are always welcome and should be e-mailed directly to dewhurst(at)ill.eu .
Having said this, as a disclaimer, it should be stated that it is not impossible that bugs and quirks may appear during operation of this software. I am confident at this stage, however, that any mathematical operations performed on data sets during reduction are correct with a corresponding accuracy in the propagation of experimental errors associated with each data set.
You ‘the user’ are instrumental in the continued development of GRASP by reporting bugs or suggestions for improvement. You are also encouraged to actively participate in the development of GRASP to your specific needs. ‘User modules’ to tailor GRASP can be easily and almost seamlessly integrated into the general GRASP interface without modification of main code.
- Current Version: 11.05c
- Version Date: 02-07-2026
- Development Environment: MATLAB™ (R2025b)
- Supported Platforms (runtime version): PC Windows, Linux, MacOS (Intel x86), MacOS (ARM 64)
- Supported Instrument Data: ILL: D11, D22, D22 SAXS, D33, SAM, D16, XtremeD, T13A, T13C, SONX; PSI SINQ: SANS I and SANSII; NIST: NG7 and NG3; ORNL: CG2, FRM2: SANS1, KWS1, KWS2, KWS3; ANSTO: Quokka
"GRASP" Runtime Version
- Stand-alone
- No license required
- FREE
Download according to your OS:
Latest Version: Grasp_Subdivisions V11 (2026)
GRASP “Subdivisions” aims to separate client and server sides of the GRASP program. In other words, separate the GUI from the data organisation and reduction part of GRASP. As such GRASP is now command line or script alone operable as a headless application. GRASP “Subdivisions” also has substantial improvements the its GUI organisation and a full separation of the Grasp Plot output for extracted data from the main program. Grasp Plot can operate as a stand-alone MATLAB™ graph plotting program. A number of other internal reorganisation and code refactoring have been made for improvements to efficiency, speed and maintainability.
Windows64bit_compiledR2025b (~100 MB)
Linux64bit_compiledR2025b (~100 MB)
[Note: Unzip the archive. In a command terminal navigate to the grasp_linux_compiled directory and run the 'go_grasp.sh' script by typing './go_grasp.sh' in the command terminal.
If problems, then please verify the path of the installed Matlab MCR runtime libraries in the go_grasp.sh script]
Macintosh Intel x86 64bit_compiledR2025b (~100 MB)
Macintosh ARM 64bit_compiledR2025b (~100 MB)
[Note: Mount the DMG file. In a command terminal navigate to /Volumes/grasp_mac_compiled/ and run the 'go_grasp.sh' script by typing './go_grasp.sh' in the command terminal.
If problems, then please verify the path of the installed Matlab MCR runtime libraries in the go_grasp.sh script]
Important: Macintosh security - It is becoming increasingly difficult to launch non Apple verified code on Macs, depending on the version of Mac OS. In some cases it is enough to try to open Grasp via double clicking the icon (which doesn't run Grasp correctly as it needs to be run from a terminal via the go_grasp.sh script) but allows a security exception. Then run grasp from a Terminal using the './go_grasp.sh' script.
For Mac OS Sonoma running on Apple Silicon M2 processor you should mount the DMG of the Grasp package then copy the contents into another (writeable) folder, e.g. /Desktop/Grasp. Run the './go_grasp.sh' script from this folder which now includes the statement 'xattr -cr grasp.app' to change the Grasp file attributes to allow Grasp to run from this unauthorsied developer (me). Hope this works all you Mac users.
Previous Version: Grasp_Subdivisions-1 V11 (2026)
In case of difficulties with the current compiled version (i.e. Charles messed something up and then went on holiday) you can download the previous 'n-1' version using the links below:
Windows64bit_compiledR2025b (~100 MB)
Linux64bit_compiledR2025b (~100 MB)
Macintosh Intel x86 64bit_compiledR2025b (~100 MB)
Macintosh ARM 64bit_compiledR2025b (~100 MB)
NOTE:
You must download the Free MATLAB™ Component Runtime Libraries ('MRCInstaller') in order to execute the compiled Grasp code.
MCRInstaller (Windows) - R2025b 64Bit (4.6 GB)
MCRInstaller (Linux) - R2025b 64Bit (4.7 GB)
"GRASP" MATLAB-Code Version
- Platform independent code
- User configurable
- MATLAB™ Command Line interface and data access
- Build User Modules and routines to interact with the main GRASP interface
- Add custom Fit Functions
- REQUIRES MATLAB™
Latest Version: Grasp_Subdivisions V11 (2026)
Previous Release: Grasp_Variant V10 (2025)
The previous GRASP release V10 'Variant' is made availaible here for legacy reasons, version stability and while the new GRASP release 'Subdivisions' becomes tested and established.
Download Grasp_Variant V10.39f (11 / 05 / 2026) and the appropriate MATLAB™ runtime libraries (R2021b for Windows, Linux, Mac Intel x86, R2023b Mac ARM 64) using the links below:
Windows64bit_compiledR2021b (~100 MB)
Linux64bit_compiledR2021b (~100 MB)
Macintosh Intel x86 64bit_compiledR2021b (~100 MB)
Macintosh ARM 64bit_compiledR2023b (~100 MB)
NOTE:
You must download the Free MATLAB™ Component Runtime Libraries ('MRCInstaller') in order to execute the compiled Grasp code.
MCRInstaller (Windows) - R2021b 64Bit (3.6 GB)
MCRInstaller (Linux) - R2021b 64Bit (3.7 GB)
Visit www.mathworks.com for MATLAB™ information
Author Information
GRASP has been developed by Charles Dewhurst ( dewhurst(at)ill.eu) and:
- is freely available for use and user contribution for non-commercial purposes.
- has been developed at the Institut Laue-Langevin (ILL) and remains copyright of the ILL.
- is provided free of charge, "as is", and with no warranty.